Angaben zur Quelle [Bearbeiten]
| Autor | Sonja Mafalda Buhmann |
| Titel | Analyse von Feinmotorikstörungen bei Patienten mit Schädel-Hirn-Trauma |
| Ort | München |
| Jahr | 2005 |
| Anmerkung | Diss. Ludwig-Maximilians-Universität München |
| URL | https://edoc.ub.uni-muenchen.de/4593/1/Buhmann_Sonja.pdf |
Literaturverz. |
nein |
| Fußnoten | nein |
| Fragmente | 4 |
| [1.] Ahh/Fragment 009 17 - Diskussion Zuletzt bearbeitet: 2018-04-04 20:53:49 Xerendip | Ahh, Buhmann 2005, Fragment, SMWFragment, Schutzlevel, Verschleierung, ZuSichten |
|
|
|
| Untersuchte Arbeit: Seite: 9, Zeilen: 17-29 |
Quelle: Buhmann 2005 Seite(n): 14, Zeilen: 23-33 |
|---|---|
| Wird ein Gegenstand in der Hand gehalten, müssen die Fingerkräfte exakt kontrolliert werden, zum Beispiel muss ein „rutschiger“ Gegenstand mit erhöhter Kraft zwischen den Fingerkuppen gehalten werden, damit er nicht aus der Hand gleitet. So erfordert etwa feuchte Seife eine höhere Griffkraft als eine trockene. Die Objekteigenschaften wie Gewicht und Oberflächenreibung stellen bestimmte Anforderungen an die Höhe der Griffkraft, die notwendig ist, um ein Herunterfallen des Gegenstandes zu verhindern (Flanagan u. Johansson, 2002). Andererseits sollten die Fingerkräfte bei der Objektmanipulation vor allem bei zerbrechlichen Gegenständen nicht übermäßig hoch sein, um eine Schädigung oder Zerstörung des Gegenstandes zu vermeiden. Die exakte Abstimmung der Griffkraft begünstigt die Beweglichkeit der Finger und damit die Feinmanipulation von Objekten. | Wird ein Gegenstand in der Hand gehalten, müssen die Fingerkräfte exakt kontrolliert werden, z.B. muss ein „rutschiger“ Gegenstand mit erhöhter Kraft zwischen den Fingerkuppen gehalten werden um ein Gleiten des Objektes aus der Hand zu verhindern. [...] Beim Hantieren mit feuchter Seife muss eine höhere Griffkraft aufgebracht werden, als beim Halten einer wesentlich griffigeren trockenen Seife. Andererseits sollten die Fingerkräfte bei der Objektmanipulation vor allem bei zerbrechlichen Gegenständen nicht übermäßig hoch sein. Die exakte Regulation der Griffkraft begünstigt die Beweglichkeit der Finger und damit die präzise Manipulation von Objekten. |
Kein Hinweis auf die Quelle. |
|
| [2.] Ahh/Fragment 010 01 - Diskussion Zuletzt bearbeitet: 2018-04-04 20:48:42 Xerendip | Ahh, Buhmann 2005, Fragment, SMWFragment, Schutzlevel, Verschleierung, ZuSichten |
|
|
|
| Untersuchte Arbeit: Seite: 10, Zeilen: 1 ff. (ganze Seite) |
Quelle: Buhmann 2005 Seite(n): 15, Zeilen: 6-14 |
|---|---|
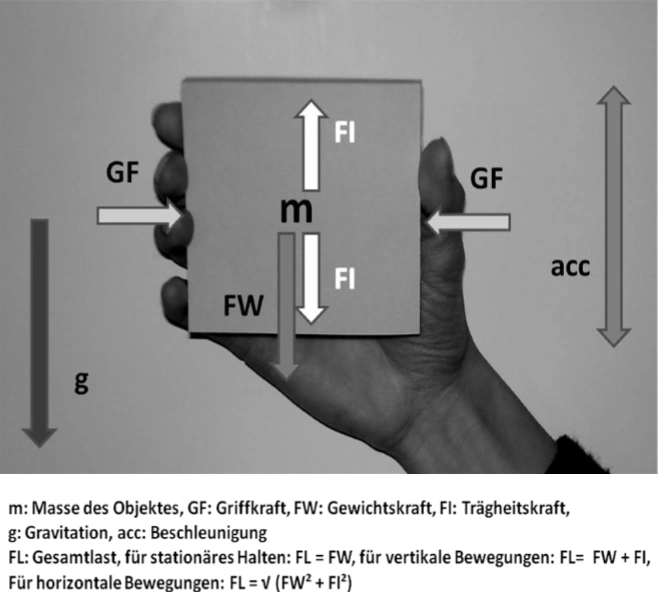
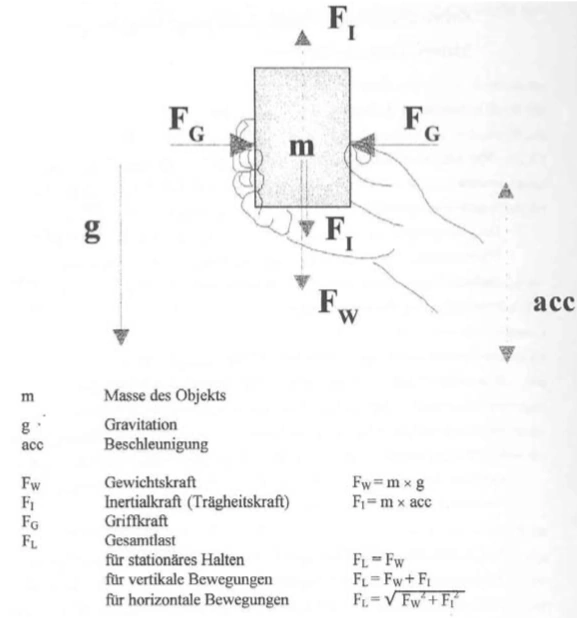
| Die Kraft, die tangential zur Oberfläche des Gegenstandes wirkt, ist eine Resultierende aus den Komponenten Gewichtskraft und Trägheitskraft, proportional zur Beschleunigung des Objektes (siehe Abb. 1).
Abbildung 1: Darstellung der physikalischen Kräfte, die während der Manipulation eines in der Hand gehaltenen Gegenstandes auftreten, am Beispiel vertikaler Armbewegungen entlang der Längsachse des Objektes. Die Gesamtlast (FL) muss durch eine adäquate Griffkraft (GF) kompensiert werden, um ein Gleiten des Objekts aus der Hand zu verhindern. Die Gesamtlast (FL) ist für statisches Halten, vertikale und horizontale Bewegungen unterschiedlich zu berechnen. |
Die Kraft, die tangential zur Oberfläche des Gegenstandes wirkt, ist nun eine Kombination aus den Komponenten Gewichtskraft und Trägheitskraft, proportional zur Beschleunigung des Objektes (siehe Abbildung 1)
Abbildung 1: Darstellung der physikalischen Kräfte, die während der Manipulation eines in der Hand gehaltenen Gegenstandes auftreten, am Beispiel vertikaler Armbewegungen entlang der Längsachse des Objektes. Die Gesamtlast (FL) muss durch eine adäquate Griffkraft (FG) kompensiert werden, um ein Gleiten des Objekts aus der Hand zu verhindern. Die Gesamtlast (FL) ist für statisches Halten, vertikale und horizontale Bewegungen unterschiedlich zu berechnen. |
Kein Hinweis auf die Quelle. |
|
| [3.] Ahh/Fragment 011 01 - Diskussion Zuletzt bearbeitet: 2018-04-04 21:04:44 Xerendip | Ahh, Buhmann 2005, Fragment, SMWFragment, Schutzlevel, Verschleierung, ZuSichten |
|
|
|
| Untersuchte Arbeit: Seite: 11, Zeilen: 1 ff. (ganze Seite) |
Quelle: Buhmann 2005 Seite(n): 15-16, Zeilen: 15: 15 ff.; 16: 1 ff. |
|---|---|
| 1.2 Griffkraftsteuerung
Johansson und Westling untersuchten das Heben, Halten und Absetzen eines zwischen Daumen und Zeigefinger, im sog. Präzisionsgriff, gehaltenen Testobjektes (Johansson u. Westling, 1984). Dabei konnten sie zwischen sieben Phasen differenzieren (Abb.2). Zunächst werden die Finger bis zur Berührung an das Objekt herangeführt. In der ersten Phase (a) wird die Griffkraft sukzessive erhöht (preloading) und anschließend steigt in einer zweiten Phase (b) die Hebekraft parallel zur Griffkraft an (loading). In dieser Phase wird das Objekt entsprechend der an den Griffflächen wirkenden Hebekraft nach oben gezogen. Übersteigt die Hebekraft nach oben die Gewichtskraft (c), hebt das Objekt von der Unterlage ab (transitional phase). Während das Objekt in der gewünschten Position gehalten wird (d), ist die Griffkraft nahezu konstant (static phase). Nach dem Rücktransport (e) des Objektes zur Unterlage (replacement) ohne wesentliche Kraftänderungen und nach einer Verzögerung (f) wird (Phase g) die Griffkraft entsprechend der Abnahme der Hebekraft gesenkt (unloading), und die Versuchsperson löst den Präzisionsgriff. Die Koordination zwischen Griffkraft und Hebekraft bzw. Gesamtlast kann als Relation zwischen den beiden Kräften dargestellt werden (Abbildung 2b). Um ein Rutschen des Objektes zu verhindern, muss das Verhältnis zwischen Griffkraft und Gesamtlast das minimal notwendige Verhältnis (slip ratio) zwischen den beiden Kräften, das durch den Reibungskoeffizienten zwischen Objektoberfläche und Haut bestimmt wird, übersteigen. Zur Bestimmung der slip ratio wurden die Versuchspersonen aufgefordert, den Griff zu lockern und das Testobjekt aus der Hand rutschen zu lassen. Die slip ratio wird durch die Griffkraft bestimmt, die am Objekt wirkt, wenn dieses eben zu rutschen beginnt. Die Differenz zwischen der tatsächlich aufgebrachten Griffkraft und der slip ratio repräsentiert eine „Sicherheitsmarge“ (safety margin) zur Vermeidung von Rutschbewegungen bei der Objektmanipulation z.B. durch Ermüdung der Fingerkräfte oder Änderung des Reibungskoeffizienten durch Schwitzen (Abb. 2b). |
[Seite 15]
1.3.2 Abstimmung der Kräfte bei Heben und Halten eines Objektes Johansson and Westling untersuchten das Anheben, Halten und Absetzen eines zwischen Daumen und Zeigefinger, im so genannten Präzisionsgriff, gehalten [sic] Testobjektes (Johansson and Westling, 1984). Dabei konnten sie zwischen sieben Phasen differenzieren (Abb.2). Zunächst werden die Finger bis zur Berührung an das Objekt herangeführt. In der ersten [Seite 16] Phase(a) wird die Griffkraft sukzessive erhöht (preloading) und anschließend steigt in einer zweiten Phase (b) die Hebekraft parallel zur Griffkraft an (loading) In dieser Phase wird das Objekt entsprechend der an den Griffflächen wirkenden Hubkraft nach oben gezogen. Übersteigt die Hubkraft nach oben die Gewichtskraft (c), hebt das Objekt von der Unterlage ab (transitional phase). Während das Objekt in der gewünschten Position gehalten wird (d), ist die Griffkraft nahezu konstant (static phase). Nach dem Rücktransport des Objektes zur Unterlage (replacement) ohne wesentliche Kraftänderungen und einer Verzögerung (f) ändert sich die Griffkraft wiederum parallel zur Hubkraft (g). Die Griffkraft wird gesenkt (unloading) und die Versuchsperson löst den Präzisionsgriff. Die Koordination zwischen Griffkraft und Hubkraft bzw. Gesamtlast kann als Relation zwischen den beiden Kräften dargestellt werden (Abbildung 2b). Um ein Rutschen des Objektes zu verhindern, muss das Verhältnis zwischen Griffkraft und Gesamtlast, das minimal notwendige Verhältnis (slip ratio) zwischen den beiden Kräften, das durch den Reibungskoeffizienten zwischen Objektoberfläche und Haut bestimmt wird, übersteigen. Zur Bestimmung der slip ratio wurden die Versuchspersonen aufgefordert den Griff zu lockern und das Testobjekt aus der Hand rutschen zu lassen. Die slip ratio wird durch die Griffkraft bestimmt, bei der das Objekt wirkt [sic], wenn dieses eben zu rutschen beginnt. Die Differenz zwischen der tatsächlich aufgebrachten Griffkraft und der slip ratio repräsentiert eine „Sicherheitsmarge“ (safety margin) zur Vermeidung von Rutschbewegungen bei der Objektmanipulation z.B. durch Ermüdung der Fingerkräfte oder Änderung des Reibungskoeffizienten durch Schwitzen. |
Kein Hinweis auf die Quelle. |
|
| [4.] Ahh/Fragment 012 01 - Diskussion Zuletzt bearbeitet: 2018-04-04 21:35:51 Xerendip | Ahh, Buhmann 2005, Fragment, KomplettPlagiat, SMWFragment, Schutzlevel, ZuSichten |
|
|
|
| Untersuchte Arbeit: Seite: 12, Zeilen: 1-10 |
Quelle: Buhmann 2005 Seite(n): 17, Zeilen: 1-6 |
|---|---|
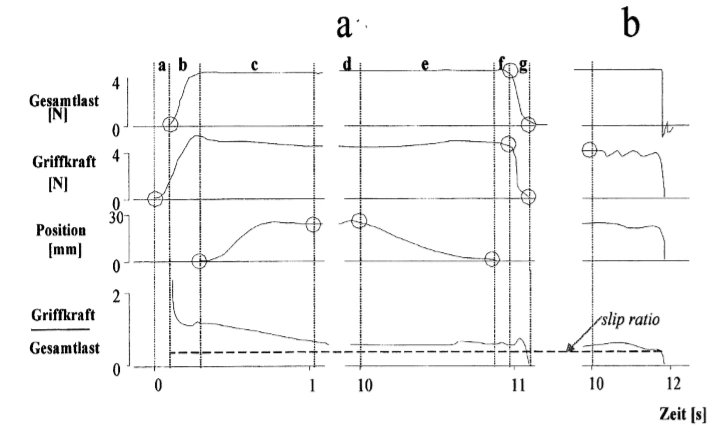
'Abbildung 2: a) Gesamtlast (Hebekraft), Griffkraft, vertikale Position und Verhältnis zwischen Griffkraft und Gesamtlast eines einzelnen Hebeversuchs (Objektgewicht: 400 g; Oberflächenstruktur: Sandpapier). Erläuterungen zu den sieben Phasen a – g im Text. b) Bestimmung der minimalen Griffkraft (slip force). Die vertikale gepunktete Linie kennzeichnet den Beginn der willentlichen Kraftreduktion. Die minimale Differenz zwischen Griffkraft und Gesamtlast (slip ratio) ist abhängig vom Reibungskoeffizienten zwischen Objektoberfläche und Haut. Modifiziert nach Johansson et al. (1984). |
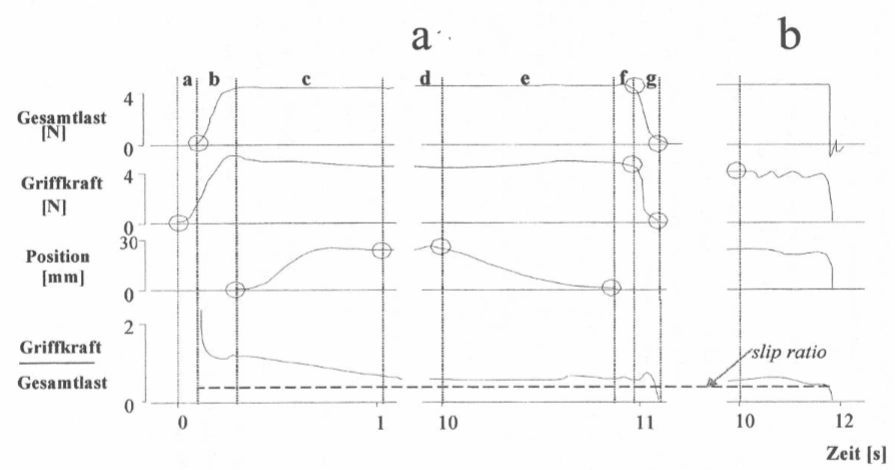
Abbildung 2: a) Gesamtlast (Hubkraft), Griffkraft, vertikale Position und Verhältnis zwischen Griffkraft und Gesamtlast eines einzelnen Hebeversuchs (Objektgewicht: 400g; Oberflächenstruktur: Sandpapier). Erläuterungen zu den sieben Phasen a – g im Text. b) Bestimmung der minimalen Griffkraft (slip force). Die vertikale gepunktete Linie kennzeichnet den Beginn der willentlichen Kraftreduktion. Die minimale Differenz zwischen Griffkraft und Gesamtlast (slip ratio) ist abhängig vom Reibungskoeffizienten zwischen Objektfläche [sic] und Haut. Modifiziert nach Johansson et al. (1994). |
Kein Hinweis auf die Quelle. |
|